에어베어링의 해석과 수치 시뮬레이션은 오랫동안 연구되어 온 분야로, 그 역사와 다양한 방법들은 문헌에서 잘 정리되어 있다[1]. 하지만 실제로 이를 구현하려면 고도의 수치 해석 및 코딩 역량이 필요하다. 이를 해결하는 한 가지 방법은 COMSOL과 같은 멀티피직스 소프트웨어를 활용하는 것이다. 이 소프트웨어는 에어베어링 시뮬레이션에도 널리 사용되고 있다[2][3]. 그러나 높은 정확도를 얻기 위해서는 상당한 모델링 작업이 필요하며, 특히 마이크로 그루브(Micro-Groove) 방식과 리스트릭터(Restrictor) 방식의 베어링을 모델링할 때는 맞춤형 접근이 필수적이다. 이러한 상용 소프트웨어는 다양한응용 분야에서 유용하지만, 일부 기능만 활용해 특정 문제를 분석하는 경우 비용 대비 효율성이 떨어질 수 있다. 특히, 라이선스 비용이 부담으로 작용할 수 있으며, 이는 연구자들에게 진입 장벽이 되거나상당한 시간 투자를 요구하는 요소가 될 수 있다. 또한, 전 세계 연구자들이 사실상 동일한 시뮬레이션 모델을 각각 개발해 온 것도 비효율적일 가능성이 크다. 이번 프로젝트는 새로운 모델링 기법을 제안하는 것이 아니라, 접근성과 모듈성을 고려한 오픈소스 시뮬레이션 플랫폼을 제공하는 데 초점을 맞추고 있다. Eitzenberger는 2024년 말까지 이 시뮬레이션의 첫 번째 버전을 GitHub에 공개할 예정이며, 이를 기반으로 연구자들이 적극적으로 활용하고, 공동 개발에 참여하기를 기대하고 있다.
Eitzenberger 노즐과 마이크로-그루브 방식의 에어베어링에서 주어진 공기 간격에 따른 압력 분포
드라이빙 시뮬레이터
드라이빙 시뮬레이터는 360도 프로젝션과 실제 차량이 포함된 캐빈 형태로 구성되며, 헥사포드와 리니어 축 위에 수직으로 장착된다. 보다 현실적인 주행 환경을 구현하기 위해, 헥사포드는 에어베어링이적용된 리니어 축을 따라 움직인다. Eitzenberger는 이 리니어 축을 위한 에어베어링을 설계·제작했으며, 현장에서 레일의 정밀 가공까지 수행했다. 주요 기술적 과제는 높은 강성, 내구성, 넓은 공기 간격, 경량화, 그리고 콤팩트한 디자인을 동시에 실현하는 것이었다. 이 에어베어링은 9 bar의 압력으로 작동하며, 시뮬레이터는 최대 10 m/s²의 가속력을 구현할 수 있다.
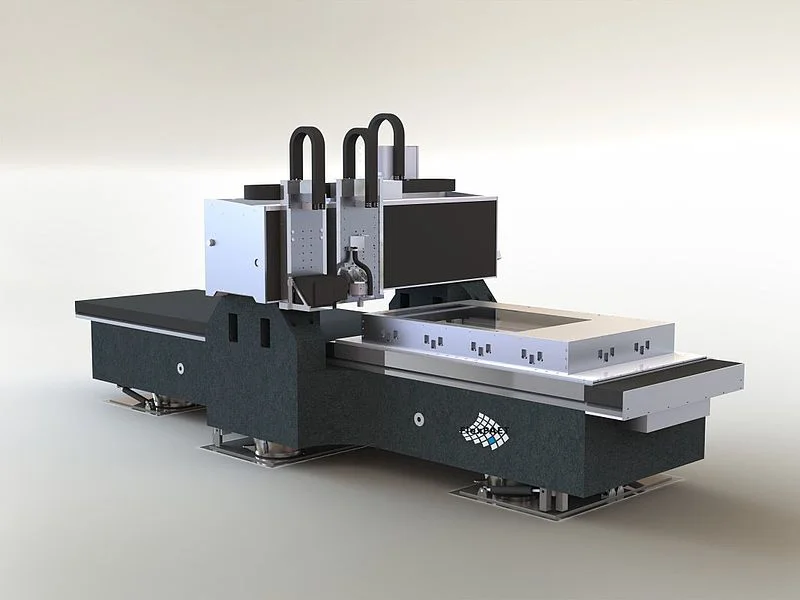
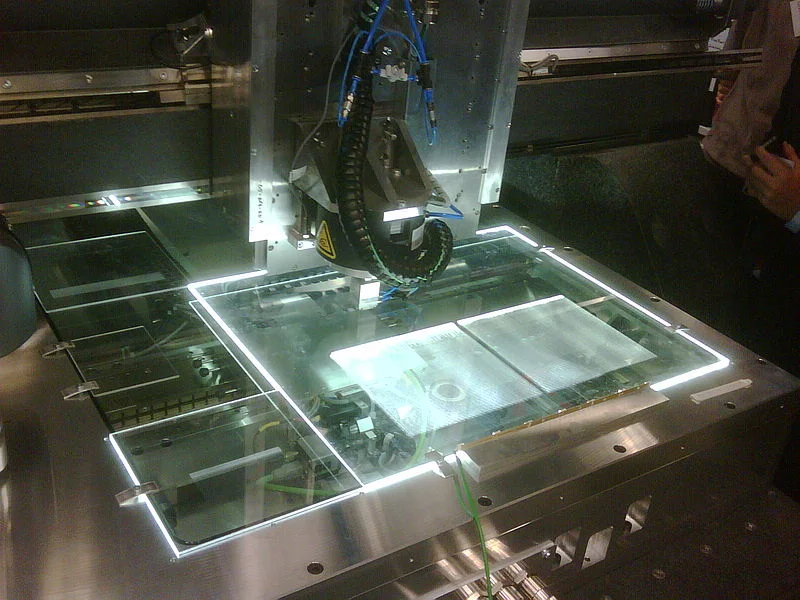
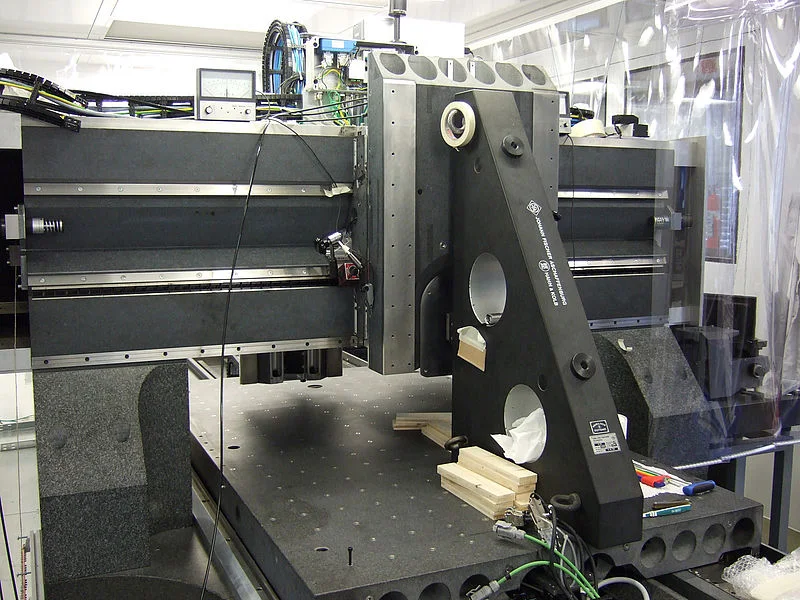
7축 시스템
2,000 mm × 1,000 mm 크기의 평면 광학 구조물을 위한 페이스 밀링, 핫 스탬핑 및 공정 내 측정이 가능하다.
롤링 로드 및 컨베이어
이 시스템은 자동차 산업의 환경풍동시험장(EWT)에서 사용된다. EWT에서는 차량이 정지한 상태에서 도로 주행 환경을 재현하기 위해, 폭 3m의 강철 벨트가 차량 아래에서 움직인다. 이 벨트는 최대300 km/h의 속도로 동작할 수 있다. 롤링 로드 시스템의 휠 서포트 베어링은 트레드밀 아래에 위치하며, 24 bar의 고압 에어베어링이 타이어 접촉면을 지지한다. 또한, 차량 하부에서 발생하는 양압(양력)이나 음압(다운포스)에 관계없이 강철 벨트가 안정적으로 제어될 수 있도록 에어베어링과 진공 시스템을 결합한 솔루션이 추가되었다.
폴리곤 스캐너
에어베어링 방식의 스캐너 축은 최대 60,000 rpm의 속도로 동작하도록 설계되었다. 에어베어링 덕분에 마모가 없는 구조이며, 폴리곤 면의 원통형 오차는 < 1 µm 미만이다.
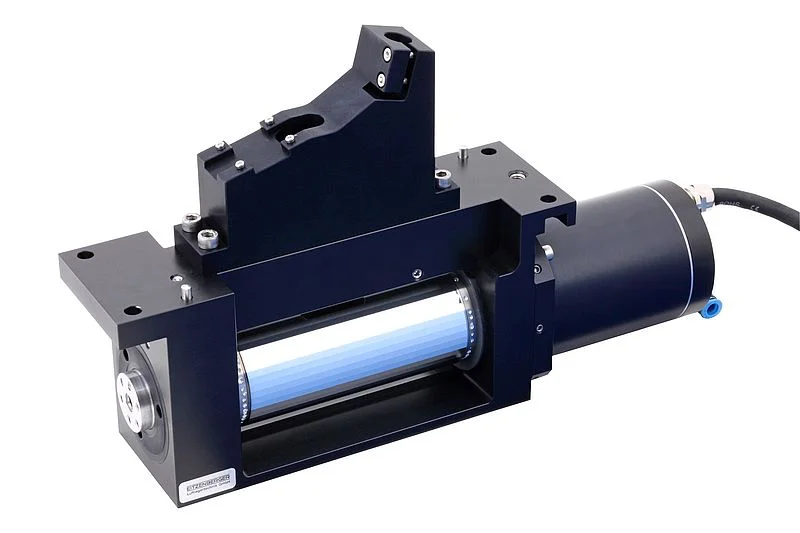
패스트 툴(Fast Tool)
에어베어링 방식의 패스트 툴은 플라스틱 렌즈의 자유형 선삭 가공에 사용되며, 습식 가공 환경에서도 활용이 가능하다.
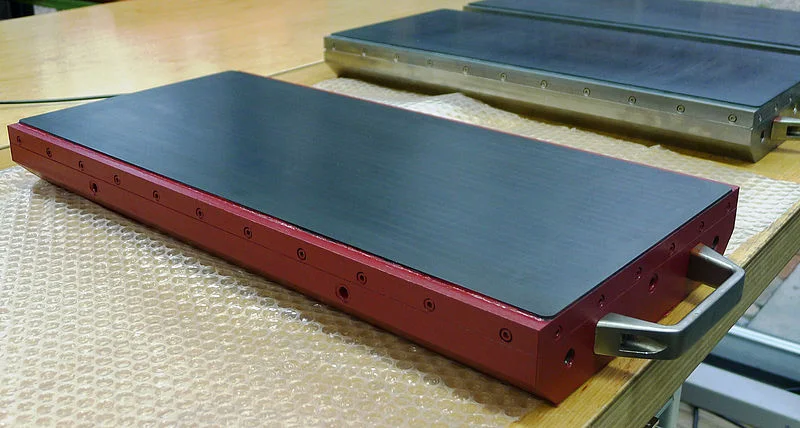
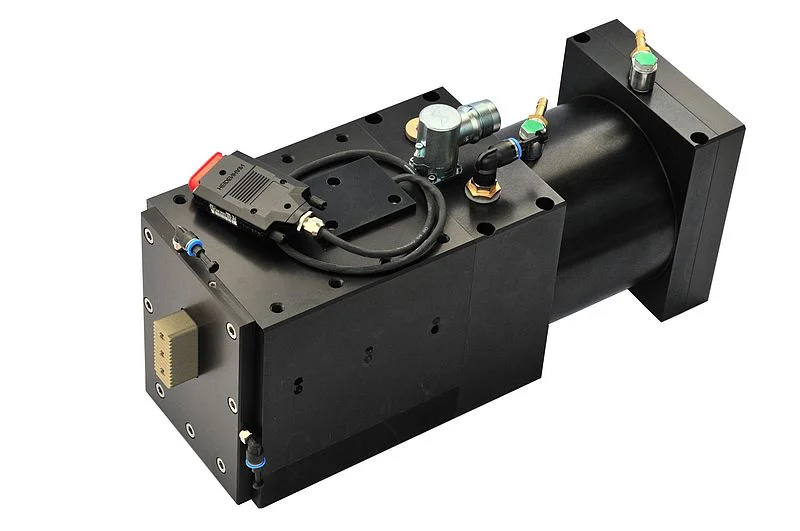
고속 리니어 스테이지
에어베어링을 적용한 고속 리니어 스테이지로, 스트로크는 600 mm이며 속도는 8 m/s, 가속도는 180 m/s², 반복 정밀도는 0.2 µm이다. 반도체 산업에서 고속·고정밀 피킹 및 플레이스(Pick-and-Place) 응용에 적합하다.